
-
.
===================================================================================================== LA BIBBIA DEL THREAD
La presente sezione NON è parte del topic originale e NON è quindi scritta dall'autore del thread.
Di seguito i link ai punti più salienti e alle informazioni più importanti che sono emerse nel thread.
Provvederemo ad aggiornare questa parte riassuntiva con nuovi link su vostre segnalazioni e comunque man mano che dovessero emergere informazioni di particolare importanza._______________
Guida Steno 1 -----> Primo tipo di chiavetta
Guida Steno 2 -----> Secondo tipo di chiavetta
Videoguida Antony -----> Video by Antony
I casi più ostici e moduli particolari -----> Tutorial per i casi "umani" piu complessi
=====================================================================================================
Qualche tempo fa, ho chiesto aiuto al forum per risolvere un problema banale ma fastidioso: comprare moduli bluetooth e non riuscire a programmarli, neanche con le interfacce seriali etc.
poichè non mi arrendo, cercando in giro sono incappato in questo sito che mi ha aperto un mondo, e sono riuscito a programmare OGNI modulo bluetooth che avevo in giro, dato per spacciato. Anche quelli che oltreoceano dicono che NON si possono programmare....
riconoscere il proprio modello è banale (conta solo la PCB più piccola ed interna, dove è montato il processore, per intenderci); a questo punto, anche se un pelo criptiche, ci sono le istruzioni per collegarlo, metterlo in modalità programmazione (per alcuni modelli e sufficiente, dopo aver aperto il monitor seriale, staccare e riattaccare il positivo che alimenta il modulo, per altri bisogna ponticellare : quando ad esempio si chiede di avere il P011 HIGH, vuoli dire che la sua tensione deve essere 3,3 V...)
Ed infine non tutti i comandi AT sono uguali e quindi a ciascuno il suo
www.martyncurrey.com/bluetooth-modules/
PS: monitor seriale: o scaricate Arduino, cosa che consiglio, oppure i vary putty, hype!terminal etc.
Edited by STENO DG - 17/12/2016, 00:39 -
.credo che lo statore sia sottoposto alla stessa spinta della cassa in senso contrario
Certo, ma non ruotando non soffre di sbilanciamenti dovuti a masse rotanti (come la colla sui magneti, appunto) non perfettamente bilanciate. -
.Io metto una punta di ceramico poi faccio girare lentamente per distribuirlo uniformemente.
Ma nessuno parla della grafite sulla cinghia?
Eccomi, per la grafite!
ho comprato da Midland, anni orsono, un matitone di grafite dura; all'inizio vita, la premo sulla parte ESTERNA e LATERALE delle cinghie, coda e motore (a passarla dentro non succede granchè, ma è meglio che l'attrito ci sia cosi i denti vengono sollecitati di meno).
Serve solo a ridurre gli attriti sui rinvii, sulle gole delle pulegge etc. però in tanti anni non ho mai cambiato cinghie per usura: se le rompo, no avete idea di come è conciato il resto....
la grafite meno dura, tipo la polvere che si ha grattando una mina di matita morbida, è un ottimo lubrificante, però poco adesivo. il grande vantaggio è che non appiccica polvere (ma ovviamente sporca)
In generale, uso un'ombra di grasso TRiflow sulle ruote dentate, tanto poco che non venga sparato in giro (tanto quel che serve sono strati da poche molecole): non ho notato controindicazioni.
stessa cosa su alberini etc.
Nei cuscinetti, uso olio leggero, dopo averli puliti con WD4 e soffiati con aria. dopo averlo applicato, si fa fare qualche giro e si pulisce l'eccesso con carta assorbente.
PS: in questo caso, si deve accettare che col tempo la polvere "lappi" le zone d'albero dove scorre swash e pitch slider, solo estetica. -
.
WARNING!!
x chi aggionra il FW su un Brain con versioni precedenti la 2.0:
1) se avete reversato il pitch da radio, riportate il verso "normale" su radio e usate invece il "Reversed Pitch" box su pannello 6 "Swashplate"
2) Assicuratevi che nel pannello 9 "Unit Orientation" l'icona selezionata sia effettivamente quella desiderata
magari è una precauzione inutile, ma meglio buttarci l'occhio -
.Grazie grazie

Ma 500 grammi su 5 kg si sentono per voi??!! Io e' questo che non capisco...
Ok e' "facile" togliere etti ma la differenza si sente?
Tenendo anche in considerazione che ovviamente x toiere peso si usano anche.motori piu piccoli e meno potenti...
mezzo kilo si sente eccome!
E' importante focalizzare un punto: ridurre la massa ha un effetto "leva", poichè consente di ridurre dimensioni (e, ancora, pesi) di tutti i componenti, in particolare, lipo, motori e pale.
E' anche importante focalizzare che le prestazioni attese sono diverse, e non tutte consentono di andare nella stessa direzione, al variare del peso.
Esempio: se alleggerisco posso girare più piano per avere lo stesso "pop" di collettivo; ma riduco proporzionalmente l'autorità di ciclico e coda. Quest'ultima magari la recupero con i palini più grandi, ma il ciclico fatico di più: entro certi limiti, recupero aumentando i gradi di ciclico e spippolando il FES, ma oltre manca la "materia prima" (tanta aria sulle pale). Se per il mio stile basta, allora sono a posto, sennò è meglio che metta su un pò più di potenza , lipo e aumento i giri.
Viceversa, su un eli pesante, posso aumentare i giri e recuperare il pop che voglio, ma mi ritrovo un eli inkazzosetto di ciclico, che, per quanto domato dal FES, non andrà mai in certe manovre (e.g. i coni lenti) pulito come quando abbasso i giri.
(la causa di ciò il momento giroscopico che dipende da massa, dimensione e velocità angolare del rotore... più è grande e/o pesante e/o gira forte, più tale effetto stabilizzante è marcato: mentre non ha effetto sulle manovre di collettivo, ha invece effetto su quelle di ciclico...)
Partiamo di formule (semplificate):
Lift = n * c *D^3 x O^2 x p^2
Power = n * c *D^4 x O^3 x p^3 = V x A
Lift / Peso = indice di passo (TI)
con:
n= numero di pale
c = corda della pala
D = diametro rotore
O = velocità angolare rotore
p = passo
V = volt (tensione morsetti motore)
A = corrente morsetti motore
con queste formule si possono comparare tra loro diversi allestimenti senza commettere grossi errori
N.B: grosso modo, lo stile di volo di ciascuno di noi può essere indicato dall'indice di passo (TI: Tareq Index...in onore al pollice più selvaggio che conosca), che dice che g-force siamo in grado di gestire sul ns modello.
dai numeri che mi avete dato, e dai miei modelli, i "domenical" gestiscono modelli con TI da 4 a 5; Tareq ha volato a Lodrino Oxy 3 a 6,6. Oxy 4 verrà dimensionato per TI = 7....
Per riferimento: avere un TI di 7 su un 700 da 6 kg, vuol dire girare a 2500 rpm e ciucciare 8 kW di media / 14 kW di picco... -
.
Che non sia venuto al raduno mica vole dire nulla...e ditemi voi se non sono Goloso....
(si vede la felpa...?)
-
.
 .......
....... 
(770 però) -
.
Calmi calmi!!
pura scaramanzia...
eccoqui!

e poi...


E adesso la parte interessante.
premesso che, ho fatto 3 lipo di cui le prime 2 con l'ESC non ben regolato (ho scoperto che non era in governor... e mi sembrava un pò moscio:))
Ho trovato il modo di far andare la mia vecchia PRog Card II, e il terzo volo era già "ammodino" con il suo bel governor esterno sotto Brain!.
Non ho ancora spippolato il Brain per bene, ma già il setup di default è egregio per i comandi di piatto e coda; expo, pitch pump etc da sistemare ancora sui miai neuroni, ma nn manca molto.
Ho volato a 1650 rpm: pochi, ma l'eli si comporta molto onestamente; a 1850, e si comincia a capire la razza. Credo di aver volato a 2150, e ... wowww!!!
La sensazione prevalente è che sia ben collegato ai pollici: è molto frendly, fa esattamente quello che pensi di voler fare, e lo fa con buon bilanciamento.
il sound è magnifico, buona parte del feeling è anche merito della mancanza del "grinding" delle corone; la prima impressione è di grande precisione e linearità, leggerezza ma senza essere "floatiy", galleggione.
La coda è una spada, senza farci nulla (ho su palini da 115, forse posso pure scendere un pò)
La giornata era quello che era, tutti i colori nella gamma dei grigi, ma la capoccia risalta anche nella nebbia, anche da lontano... forse un pò di colore in più aiuterebbe quelli come me, adesso vedrò come provvedere
Motore tiepido ed ESC freddo, anche le lipo più vecchie mi è sembrato stessero a loro agio: ma qui è davvero presto per dire qualsiasi cosa.
Per ora mi piace senza riserve -
.
allora,
il montaggio è finito, il setup pure, domani si prova!!!
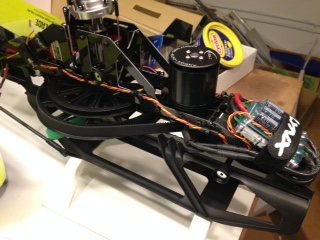
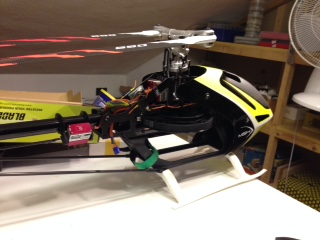
Che dire? modello molto ben fatto, come il manuale, ottimizzato nei dettagli, ha l'aria di essere ben robusto dove serve, e "cheap" dove immancabilmente si potrà sacrificare.
montaggio lineare, rapido, preciso, fatto per volare subito!!
Se proprio vogliamo trovare qualcosa: le buste con le viterie potrebbero essere un pelo più razionali; qualche pertuso in più qui e li (n particolare zona motore) faciliterebbe le fascettature del cabling per chi si ostina a nn comprare il powerbus
Ed infine, ogni promessa è debito: ho pesato meticolosamente le varie componenti, e qui in tabella trovate il confronto con un altro 700 (Compass 7HV, che avevo in casa).
Tenendo presente che in mano abbiamo una meccanica di 3 anni più nuova (le potenze dei motori sono passate dai 4800 W ai 16000 odierni...a quel tempo, l'ESC più grande era il 120 HV, oggi c'è il 400 a), e che inoltre questa meccanica è stretchabile a 800, il 4% di incremento netto di peso mi pare assolutamente ragionevole.
Vedremo in volo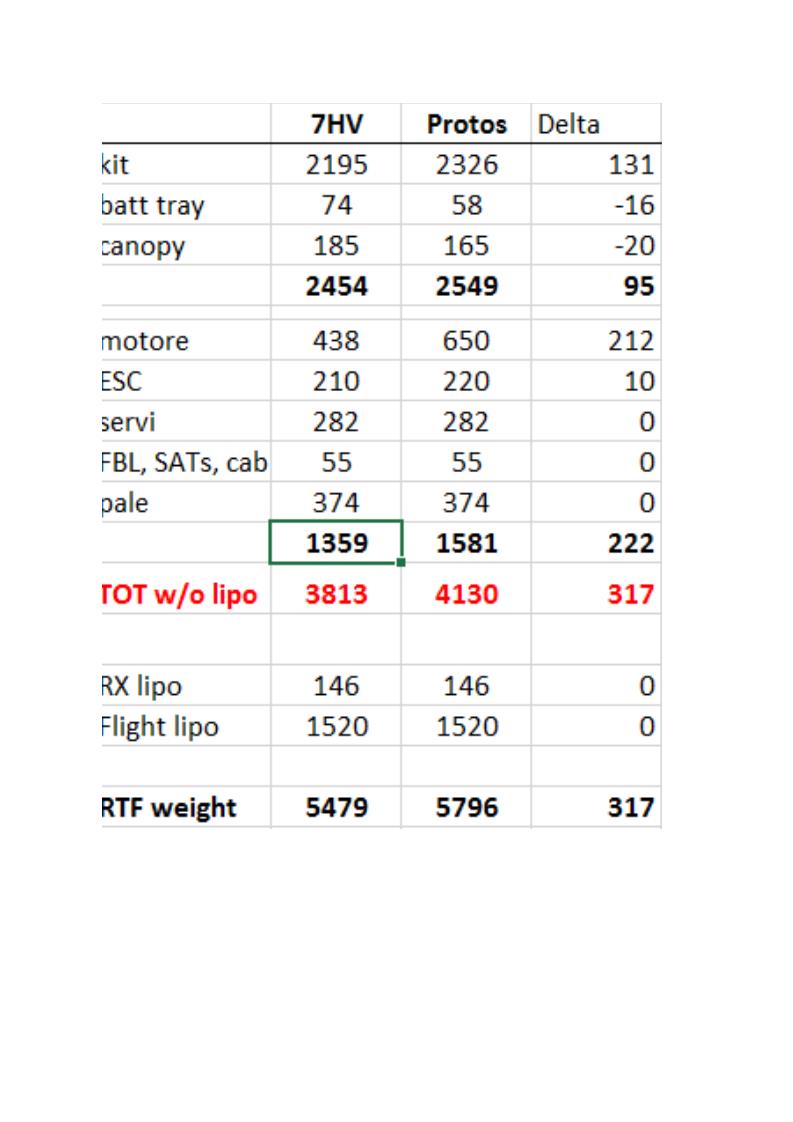
-
.Scusate l'ignoranza...
il RING serve per comandare l'escursione meccanica? Cosa su cui Pdotos e' limitato notoriamente. Nemmeno con beastx arrivavo alla famos luce blu. Su quello credo sia normale...
La speed invece comanda la velocita' dei servi? Perche' non la puoi aumentare Matts?
Ma non ho capito lento quanto adesso? Rispetto al beastx intendo... e la velocita' dei servi non e' aumentabile?
Ps all'inizio si deve settare la radio come su molte altre fes? Quello e' fondamentale x far prendere tutto comando dalla radio...
magari anche il beastx era cosi Ste,solo che usando sempre in modo tranquillo non mi ero mai posto il problema..ora invece in cui sto testando un self rescue,sto cercando di farlo flippare velocemente il problema è sorto.
La speed dovrebbe comandare la velocità dei servi,anche se tuttora non capisco nemmeno io a cosa serva realmente.
Mentre la ring praticamente è per limitare ( o aumentare) l'escursione dei servi : maggiore è , maggiore elevatore/ailer è possibile dare al modello.
Mi chiedo se questa verifica vada fatta solo a centro stick oppure anche a stick neg/ pos.
In questo punto infatti il mio problema è che se vado tutto di negativo e muovo il piatto fa interferenza ed uno dei 2 servi ronza- ho provato ad aumentare i braccetti dei servi al piatto,va un pelo meglio...ma forse non abbastanza..non saprei.
posso dirvi quello che so (mi riferisco al Brain, me credo sia lo stesso per tutti):
- cyclic ring serve a ridurre l'ampiezza COMBINATA di ele+ail: quindi se ne apprezza la funzione portando lo stick nell'angolo estremo (nord-est, su-ovest etc, in modo 2). se a questo punto si nota interferenza, con il cyclic ring si abbassa. anche perchè in volo la povera pala quando passa per quel punto dello swash ha un passo abnorme (magari aggiungendoci quello del collettivo! e più che spingere,
frena...)
- velocità di manovra: il FES limita a questo valore (ad es 360°/sec vuol dire una capriola ogni secondo) la velocità ad es di flip o roll, in una manovra CONTINUATIVA. l'accelerazione di risposta invece nn viene toccata. Quindi, per chiarire: se si fa il tic toc laterale, la limitazione di speed poco fa, a meno di non ridurla al punto che anche nei piccoli spostamenti interviene a domare le piccole velocità di roll. per analogia, è il rateo di piroetta della coda.
Se il comando ciclico è lento nella reazione, le cause possono essere:
del FES (più o meno in ordine di impatto):
- guadagni P ed I del FES bassi
- mix tra input e control loop, (che sul Brain si chiama guadagno Feed-forward): dice quanto comando va ai servi mescolando l'input della radio con il controllo del FES: più è alto, più è diretto
- Travel adj bassi (FES impostato male)
- D/R bassi (anche EXPO troppo spinto può influire sulle manovre impulsive, rallentando il comando a centro stick)
- limite di angolo max di ciclico troppo basso (pochi gradi a tutto stick: sia la corsa del comando sia cyclic ring eccessivo)
hardware:
- braccio di squadretta troppo corto (anche con servo veloce, rallenta il movimento allo swash)
- servi lenti
- pale inadatte (troppo pesanti rallentano l'accelerazione)
i giri poco fanno (si bilancia la spinta della pala con la maggiore inerzia giroscopica)
imho -
.
Mi permetto una riflessione, che spesso sfugge: quello che a noi, utenti più o meno domenicali, sembra esagerato in termini di costo, visto che è un passatempo, dal lato dell'imprenditore, è un incubo da far quadrare.
facciamo insieme due conti: quanti kit pensate che riesca a vendere un modello nel primo anno, uno qualunque, taglia media: diciamo 500 kit? 1000? ... e sono tanti... (e considerate che svilupparne uno, diverso, migliore etc etc costa fatica, mica dietro c'è l'Audi o la Siemens... dietro ci sono poche, pochissime persone che ci si dedicano).
diciamo pure che costi al pubblico 500 dollari: sono 500,000 USD di ricavi lordi. diciamo che in tasca al produttore arrivi il 50%, 250,000 USD (il resto se lo mangiano i rivenditori, gli sponsor, e spedizioni e le dogane..)
toglieteci i costi di sviluppo, i materiali, gli stampi, la manodopera....diciamo ancora la metà: restano, lordi, 125,000. in un anno, per pagare spese generali, pubblicità, soci, tasse, banche etc.
diciamo pure che al generico imprenditore resti ancora la metà: 60,000 USD, 50,000 euro, magari da dvididere. tanti? ma siete matti?? e chi glie lo fa fare? va a fare il dipendente, prende di più, non si rompe il cranio, non corre rischi (e già, perchè se invece di 1000, ne vendi 500, ci rimetti soldi freschi di tasca tua...). e magari riesce pure, come noi, a volare un pò
Perchè questa apologia? semplice: nel mercato attuale i leaders di elicotteri di alta gamma e alta qualità, sono italiani: MSH e SAB (3 se ci mettiamo anche il buon Luca con Oxy, che sta andando bene).
E non vi siete chiesti come mai questa italica concentrazione? forse perchè servono doti particolari, sia tecniche, sia di design che imprenditoriali, di fantasia e di passione, che facciano modelli sexy, prestanti, innovativi. Doti che devono avere la fortuna di essere concentrate su poche persone, viste le dimensioni delle aziende e del business.
Quello che voglio dire è che come italiani abbiamo un dovere, e un'opportunità: sostenere i nostri imprenditori, aiutarli, criticarli, certo, quando serve, ma costruttivamente. Come: semplice! siamo tutti appassionati, ciascuno di noi ha doti personali e professionali che possono alimentare un circuito virtuoso di suggerimenti, di collaborazione, di sostegno e di indirizzo verso queste aziende, che di fatto sono persone. ciascuno con i propri talenti, gusti, idee. Uno dei modi più civili e proficui è proprio un forum "vero", come questo è sicuramente, dove la discussione collettiva può far emergere indicazioni importanti.
Pensate che io sia un ingenuo, o un illuso? errore, molti settori stanno riconoscendo nel la "rete" un patrimonio reale, fresco, vitale che si apprestano, con modalità le più disparate, a impiegare.
Quindi, cogliamo questa occasione: Corrado (si, è proprio una persona, peraltro simpatica e alla mano) ha trovato, almeno fino a poco fa, un clima ed un'accoglienza sincera.
rendiamo queste discussioni fertili e concrete. Le polemiche, i preconcetti, lasciano, in genere, il tempo che trovano, non perchè magari non contengano elementi veri, ma per il modo, aggressivo e alle volte offensivo, di come vengono espressi. Proviamo a dire quello che pensiamo in maniera costruttiva; ci vuole tempo e fatica, sicuro, ma resta qualcosa. a fare "turilla" ci si sfoga e ci si compiace, certo, ma "fatti non foste per viver come bruti, ma per seguir virtute e canoscenza" .
Questo per me vuol dire "libertà di espressione"
In pace, Luca -
.
Ti ringrazio x la fiducia!
Yy indica uno schema di avvolgimento che, in due parole, è un doppio avvolgimento ad Y:)
In sostanza tantopiu cresce il numero di bracci di statore, che sono sempre multipli di 3, si possono combinare schemi di avvolgimento diversi, che, insieme alla configurazione dei magneti e dei traferri, porta a determinate caratteristiche del motore. Un beavo progettista quindi ha diverse scelte, tipo ottimizzare le prestazioni in un range di giri ( ideale x un heli).
Se fosse x macchinine, divrebbe fare scekte dicerse per avere ad esccoppia costante.
Se cerchi sul web " windings wye" trovi tanti schemi, tanto per capire
Ciauzz -
.
Credo che la discussione sia stimolante, ma non sta considerando altri aspetti, a mio dire, più importanti: in particolare la "voce del padrone" la fa il design magnetico e la qualità / configurazione dei magneti, ed in generale il design del circuito magnetico. di fatto, le leggi che governano i motori elettrici sono banali. La loro "ingegnerizzazione" , cioè come le "imprimi nel rame e nel ferro", invece fa la differenza
La questione degli avvolgimenti è sostanzialmente semplice: come dice il Primario, la migliore strategia è quella che ti fa inzeppare più rame possibile nello spazio a disposizione. E lo spazio a disposizione deriva da un compromesso, imposto dalle dimensioni del motore.
Per averci passato del tempo a studiare, giocando con numero di fili in parallelo, posso dire che, a parità di dimensioni di cava, si riesce a ridurre la resistenza dell'avvolgimento, ottenendo il doppio beneficio di aumentare le correnti che si possono assorbire e riducendo al contempo una buona frazione delle perdite. Ma si parla di qualche/diversi punti percentuali (anche se passare dal 78% all' 83% di efficienza vuol dire un miglioramento del 20% sulle dissipazioni!). e solo 5% sulla potenza resa al rotore...che però non guasta! Chi ha voglia di farsi un'idea, può guardare la tabella in allegato, che vi dice come, a parità di cassa, statore , magneti etc, si riesce a ottenere resistenze interne minori col multifilo.... in virtù del miglior inzeppamento . Da tenere presente che gli "strand" in parallelo vanno ad diminuire la resistenza totale del singolo conduttore, ancorchè un conduttore piccolo ha una resistenza maggiore di uno grande....quindi più che di teoria, si parla di pratica.
L' efficienza elettromeccanica si ottiene con il design corretto della forma di statore e cassa (traferri, spessore e qualità dei lamierini dello statore, conformazione delle scarpe etc). L'efficienza, o meglio la sua mancanza, governa quanta parte della corrente viene dissipata in calore, con il doppio effetto nefasto di sprecare energia (e non renderla alle pale), e di riscaldare il motore con effetti tecnici non gradevoli (riduzione o addirittura perdita della magnetizzazione dei magneti permanenti, dilatazioni, aumento della resistività dei conduttori). Il tutto con effetto valanga: più calore, meno efficienza, meno potenza resa: i ns bravi governor tenteranno allora di stare dietro ai ns pollici aumentando il duty cycle dell'ESC e aumentando di fatto le tensioni efficaci e quindi le correnti e quindi la dissipazione!.
Tenete presente che il raffreddamento di un motore è dovuto a tre contributi: la convezione forzata interna, che la fa da padrone, che risucchia aria dalle feritoie della cassa e forza il flusso a lambire statore e magneti (dove il calore viene generato, sia per effetto resistivo che per correnti parassite); la conduzione tra statore e piastra di supporto, che tenta di fare il resto; infine la cassa, che viene scaldata dall'aria calda interna e dalla cassa attraverso i cuscinetti / albero, e dissipa sul suo mantello esterno.
Quindi, il solo riavvolgimento può dare dei benefici/vantaggi a condizione che si riesca a metterci più rame. Altri benefici, ma di altra natura: pensate se si vuole cambiare il Kv), oppure rimediare ad avvolgimenti di bassa qualità/manifattura; oppure riparare un motore bruciato, oppure, ma è dura, cambiando il tipo di avvolgimento, tentando quindi di cambiare alcune caratteristiche del motore.
Ne concludo che Xnova abbia un miglior progettista e magari un miglior "magnetaro"; certo è che i suoi motori sono, a detta di chi ce li ha, una spanna sopra
Spero di aver dato un un pò di contributo, Luca
PS: sono autodidatta, nn è detto che sappia quel che scrivo
PSII: sono anche rinko: nn risco a mettere l'immagine ...
Votes taken by bladebuster |

